Engineers Devise a Modular System to Produce Efficient, Scalable Aquabots
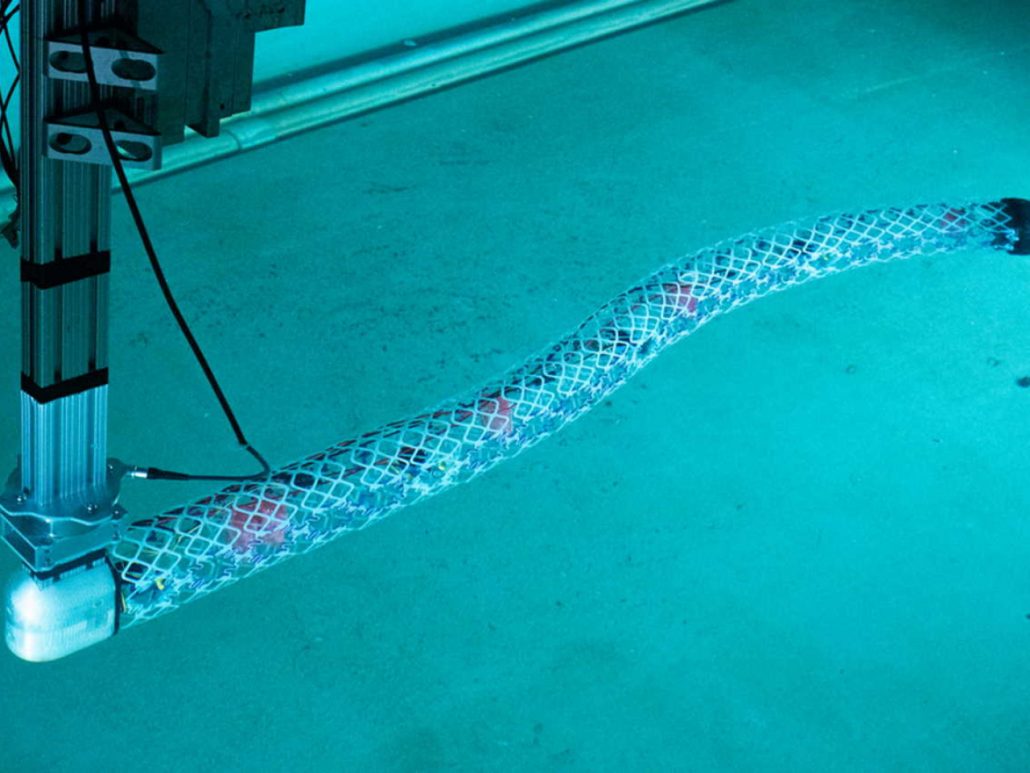
The system’s simple repeating elements can assemble into swimming forms ranging from eel-like to wing-shaped.
Now, researchers at MIT and their colleagues — including one from the original RoboTuna team — have come up with an innovative approach to building deformable underwater robots, using simple repeating substructures instead of unique components. The team has demonstrated the new system in two different example configurations, one like an eel and the other a wing-like hydrofoil. The principle itself, however, allows for virtually unlimited variations in form and scale, the researchers say.
The work is being reported today in the journal Soft Robotics, in a paper by MIT research assistant Alfonso Parra Rubio, professors Michael Triantafyllou and Neil Gershenfeld, and six others including MIT Sea Grant affiliates Dixia Fan and PhD candidate Jose del Aguila Ferrandis.
>>Read the full MIT News article
>>Video: Deformable underwater robots (MIT)
>>Video: Modular Morphing Lattices for Continuum Robotic Structures (Center for Bits and Atoms)


