
SeaPerch 101: Intro to SeaPerch
The SeaPerch underwater robot is a popular educational tool for students in grades 5-12. Hands-on and engaging, the project involves a variety of hand fabrication processes, electronics techniques, and STEM concepts. It was launched at MIT Sea Grant in 2003 and continues to thrive with competitions around the world under the leadership of RoboNation (seaperch.org). SeaPerch makers explore structures, electronics, underwater dynamics, and engineering in a context of design, iteration, and competition.
The SeaPerch story at MIT starts in the late 1990’s when former Ocean Engineering Instructor Dr. Tom Consi found the project in the book “Build your own Underwater Robot” by Harry Bohm and Vickie Jensen. He used the SeaPerch project to recruit MIT freshmen to the Ocean Engineering department and it was a hit. Prof. Chrys Chryssostomidis, then the Director of MIT Sea Grant, received funding from the Navy to turn this into a K-12 outreach initiative. And it’s been expanding ever since, with programs and competitions in all 50 states and over 35 countries!
Building on the original SeaPerch program, MIT Sea Grant started developing modules for SeaPerch II in 2021, adding both robotics and ocean science elements. The modules are all still DIY (do-it-yourself) and accessible for students in high school and often middle school. The new elements are all published as modules, and can be implemented in many different ways. Each module is robust, low-cost, and constructed using tools found in most engineering education environments and comes with associated information for students and teachers. The modules can be implemented individually or built upon each other as an integrated system, going from a single sensor to a complete autonomous underwater vehicle.
The SeaPerch II initiative is led by MIT Sea Grant Education Administrator Andrew Bennett (MIT PhD ‘97) and MIT Edgerton Center Maker Educator Diane Brancazio (MIT ME ‘90). Their vision is to create opportunities for young people to engage in authentic science investigations and engineering challenges, and to develop a passion for engineering, science, and the aquatic environment. Leveraging technologies that are more advanced, less expensive, and more accessible than when SeaPerch was first conceived, the team is designing educational tools that can be adapted to fit educators’ resources and the interests of a wide range of students and STEM enthusiasts.
New features include an onboard Arduino microcontroller, soft-robotic grippers, a variety of sensors for marine science, and even wireless control and communications. There are opportunities for additional modules and new capabilities as SeaPerch II continues to grow and expand!

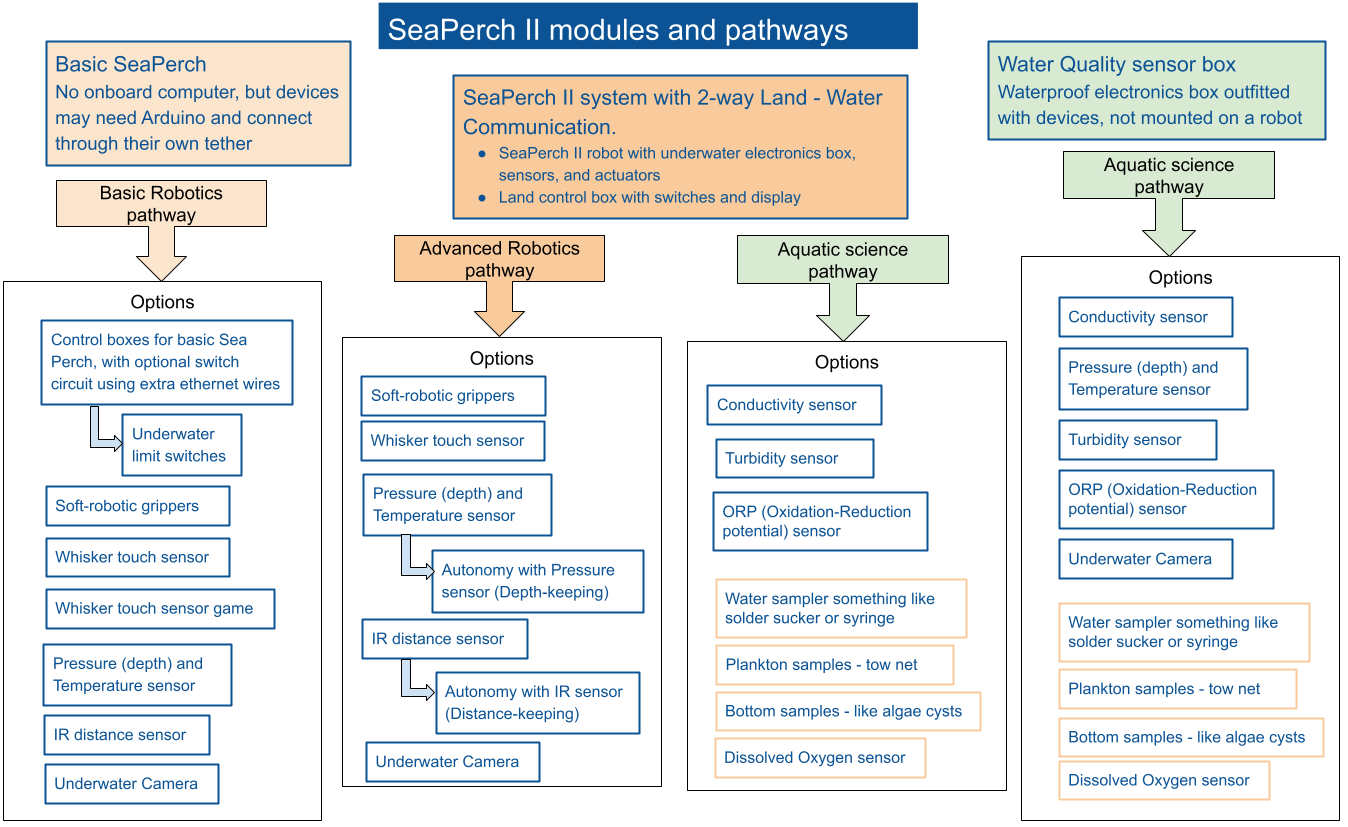
The robotics features currently include soft-robotic grippers and sensors that detect touch, depth, and distance. These elements can be used in robotics applications or challenges, aiding in navigation and object retrieval. 3D printed molds and cast silicone rubber are used in the fabrication of the soft-robotic grippers and the whisker touch sensors. For depth and distance, the electrical sensing devices are made waterproof with simple materials such as silicone, balloons, and watertight boxes. Communication, interfacing with the electronic devices, and processing of the sensor data is done on the Arduino platform. Starter code is provided for all devices, and designers are encouraged to combine and adapt the code.
The aquatic science features focus on water quality measurements that would be taken in coastal waters, both saltwater and freshwater bodies. Some measurements like temperature, salinity, and turbidity can be taken right in the water. Water samples can also be taken and brought up to measure other data, such as photosynthetic activity or dissolved oxygen levels.
The SeaPerch II team believes that there is educational and experiential value in creating sensor assemblies from the component parts: the basic sensor, a microcontroller, and a waterproof enclosure. This permits integration with other devices, enables a deeper understanding of the sensor operation and the parameter being measured, and costs less. Basic sensor components typically cost between $10 and $100. Combine this with an Arduino microcontroller and you have the foundation for a DIY testing tool. The SeaPerch team publishes build guides for the sensor modules that instruct the builder on wiring, waterproofing, coding, testing, and displaying the sensor data. A future goal for the SeaPerch II program is to empower citizen scientists to collect data and share it on a public site so communities can share information on conditions and environmental scientists may be able to notice regional trends.
The team at MIT Sea Grant is striving to make SeaPerch II a versatile tool and system that can be used by people learning robotics, aquatic science, or design and fabrication. By adding new technologies and modern applications to an established design with a large community of enthusiasts, the team hopes to support meaningful educational experiences for many young people in the years to come.
